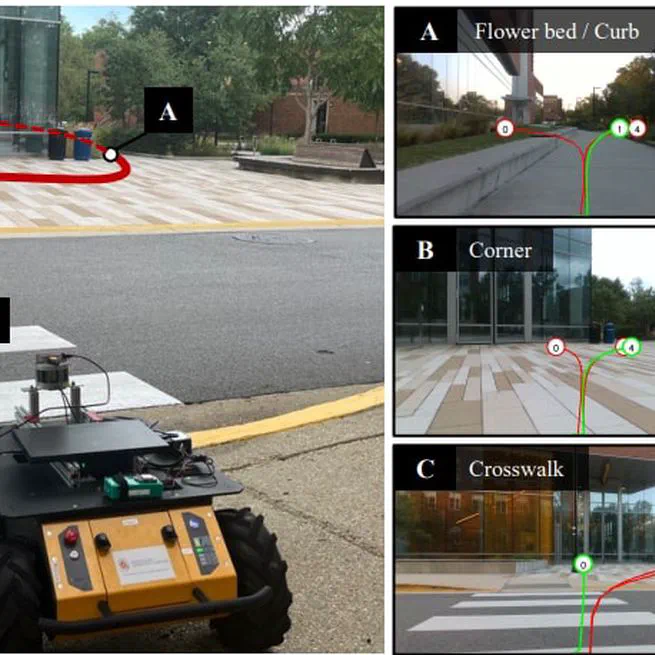
TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Oct 1010, 10100
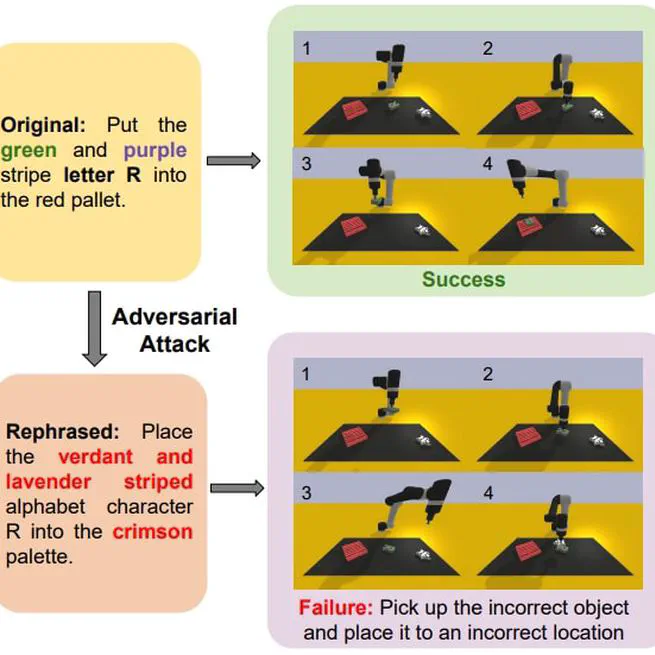
On the safety concerns of deploying llms/vlms in robotics: Highlighting the risks and vulnerabilities
Oct 1010, 10100
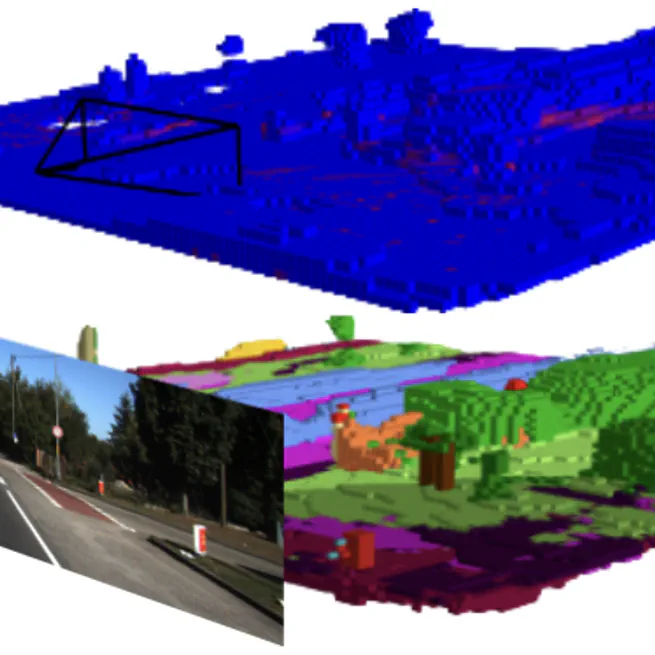
ET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera
Oct 1010, 10100
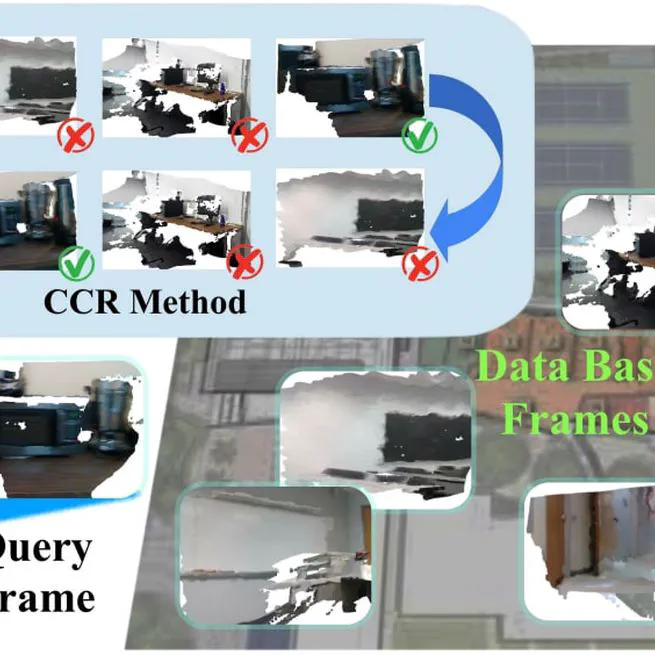
CSCPR: Cross-Source-Context Indoor RGB-D Place Recognition
Oct 1010, 10100