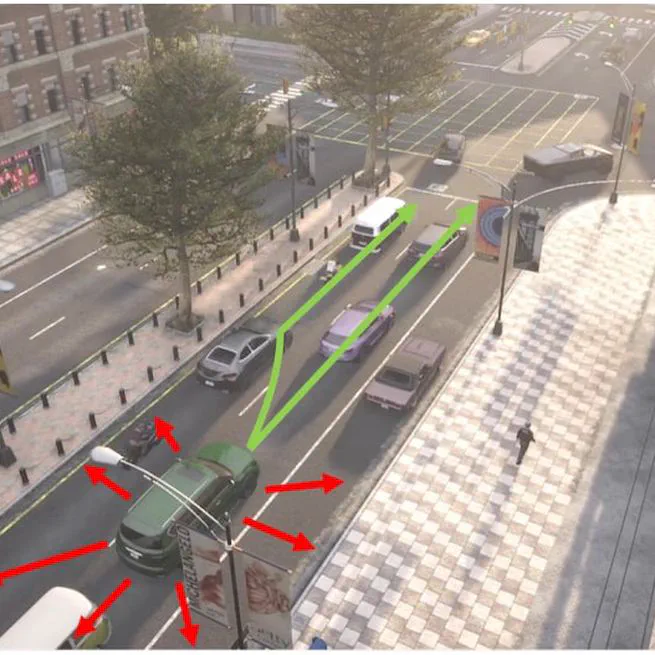
Deep Stochastic Kinematic Models for Probabilistic Motion Forecasting in Traffic
Oct 1010, 1010
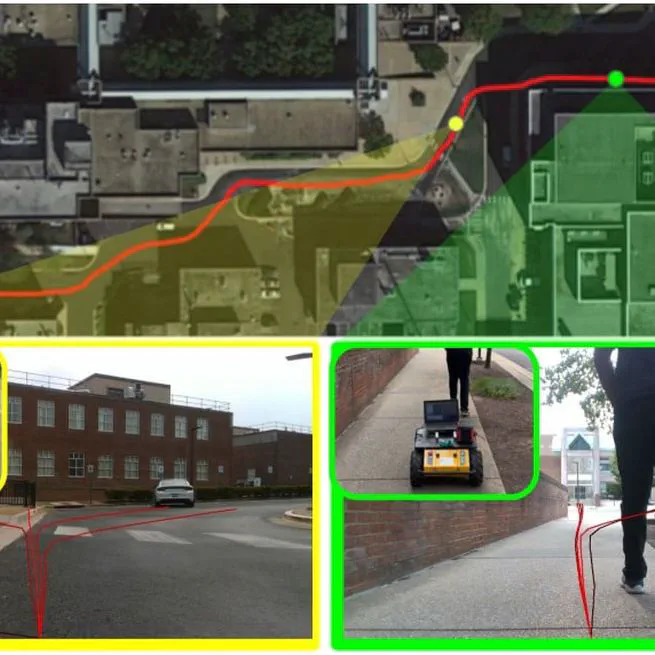
Mtg: Mapless trajectory generator with traversability coverage for outdoor navigation
Oct 55, 13130
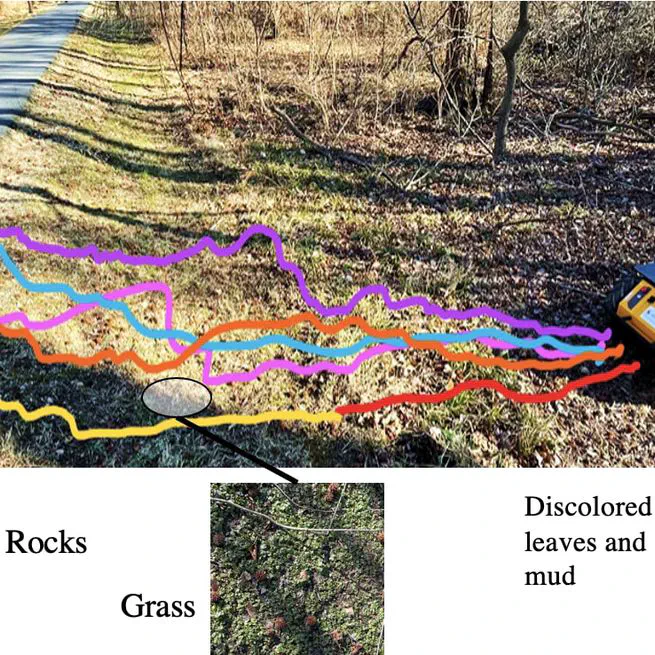
Terrapn: Unstructured terrain navigation using online self-supervised learning
Oct 1010, 23230
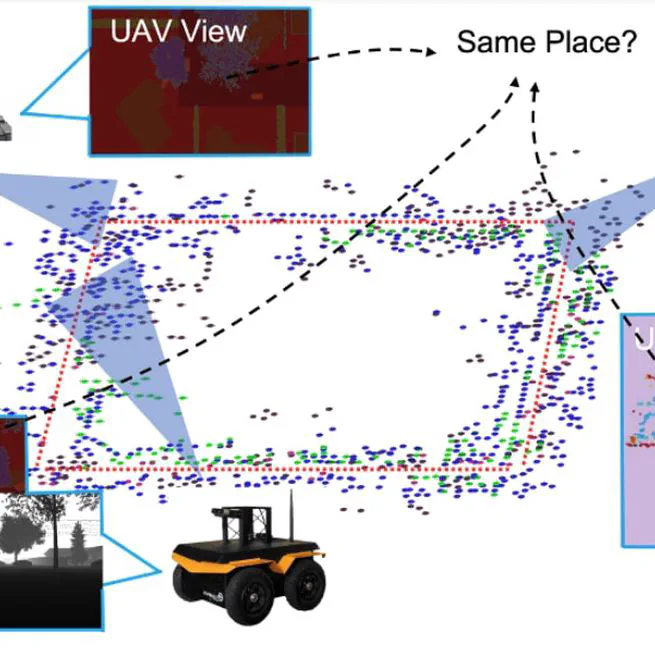
Visual, Spatial, Geometric-Preserved Place Recognition for Cross-View and Cross-Modal Collaborative Perception
Oct 1010, 1010
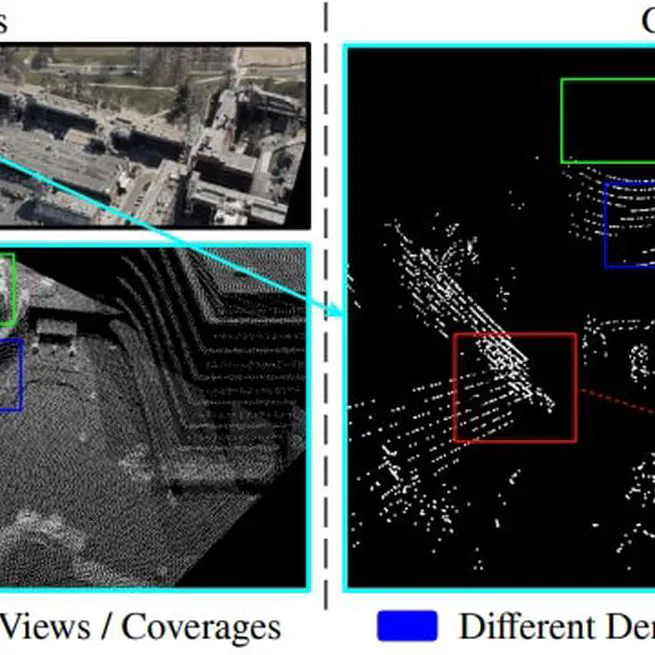
CrossLoc3D: Aerial-Ground Cross-Source 3D Place Recognition
Oct 66, 22220
XAI-N: Sensor-based robot navigation using expert policies and decision trees
Oct 99, 27270

Crowd-steer: Realtime smooth and collision-free robot navigation in densely crowded scenarios trained using high-fidelity simulation
Oct 11, 7070

DenseCAvoid: Real-time Navigation in Dense Crowds using Anticipatory Behaviors
Oct 22, 15150