Jing Liang
Open Menu
Close Menu
Bio
News
Projects
Submissions
Papers
Experience
Autonomous Driving
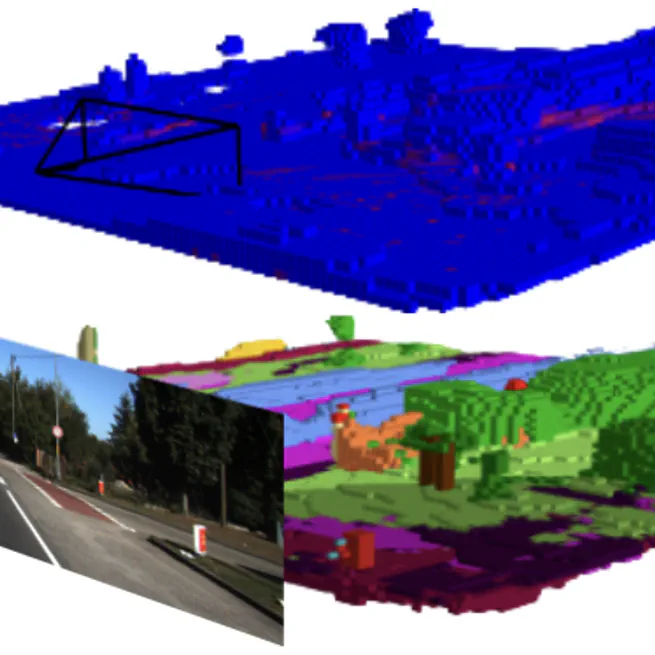
ET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera
Oct 66, 10100
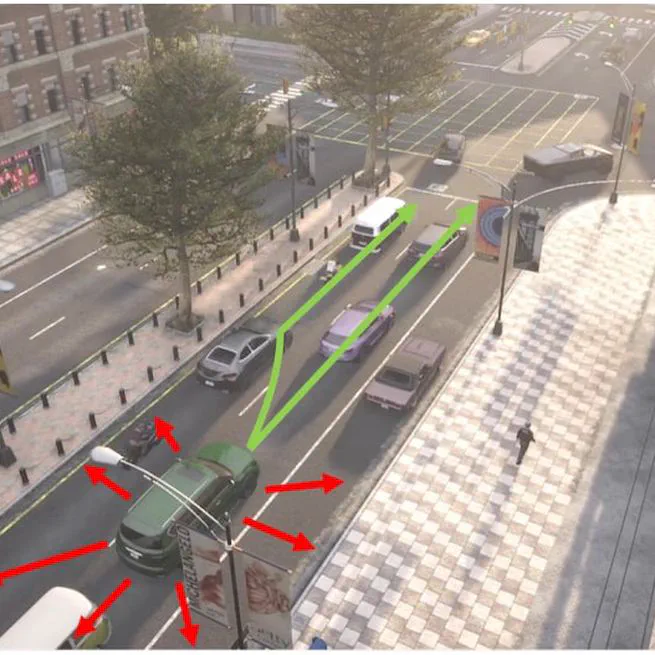
Deep Stochastic Kinematic Models for Probabilistic Motion Forecasting in Traffic
Oct 1010, 1010