
VLM-Social-Nav: Socially Aware Robot Navigation through Scoring using Vision-Language Models
Oct 11, 27270
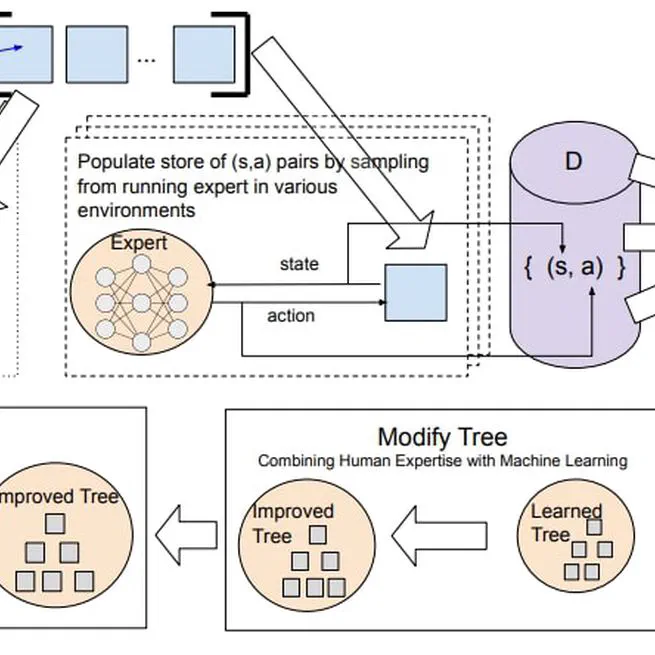
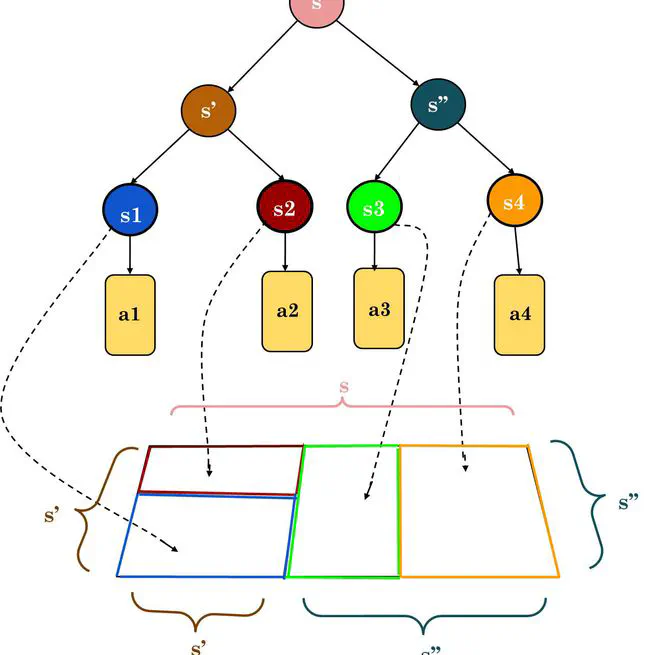
MSVIPER
Oct 77, 1010

Image-goal navigation in complex environments via modular learning
Oct 55, 30300
XAI-N: Sensor-based robot navigation using expert policies and decision trees
Oct 99, 27270

OF-VO: Efficient Navigation Among Pedestrians Using Commodity Sensors
Oct 66, 18180

Crowd-steer: Realtime smooth and collision-free robot navigation in densely crowded scenarios trained using high-fidelity simulation
Oct 11, 7070

DenseCAvoid: Real-time Navigation in Dense Crowds using Anticipatory Behaviors
Oct 22, 15150