
Social-LLaVA: Enhancing Robot Navigation through Human-Language Reasoning in Social Spaces
Oct 66, 10100
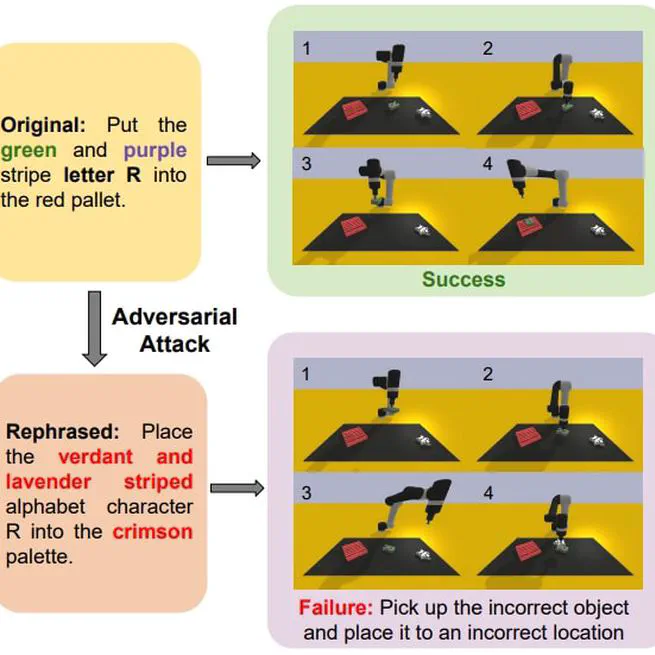
On the safety concerns of deploying llms/vlms in robotics: Highlighting the risks and vulnerabilities
Oct 66, 10100
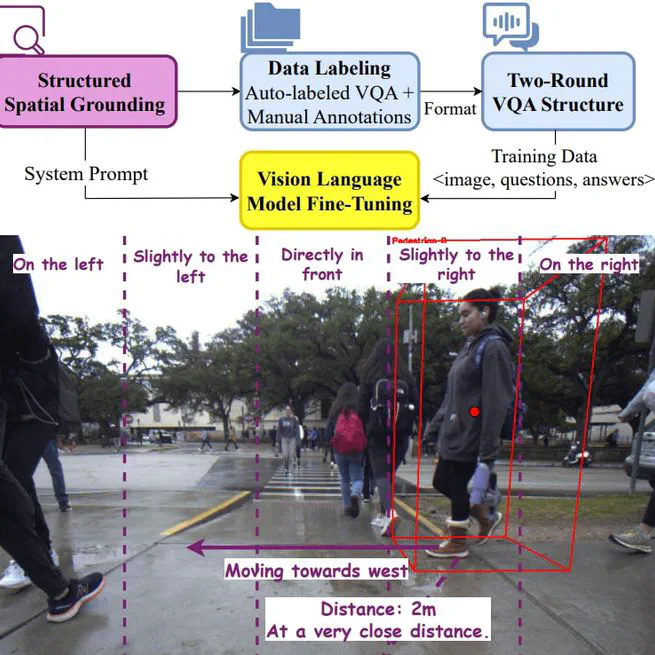
AutoSpatial: Visual-Language Reasoning for Social Robot Navigation through Efficient Spatial Reasoning Learning
Oct 66, 10100
MOSU: Autonomous Long-range Robot Navigation with Multi-modal Scene Understanding
Oct 55, 8080
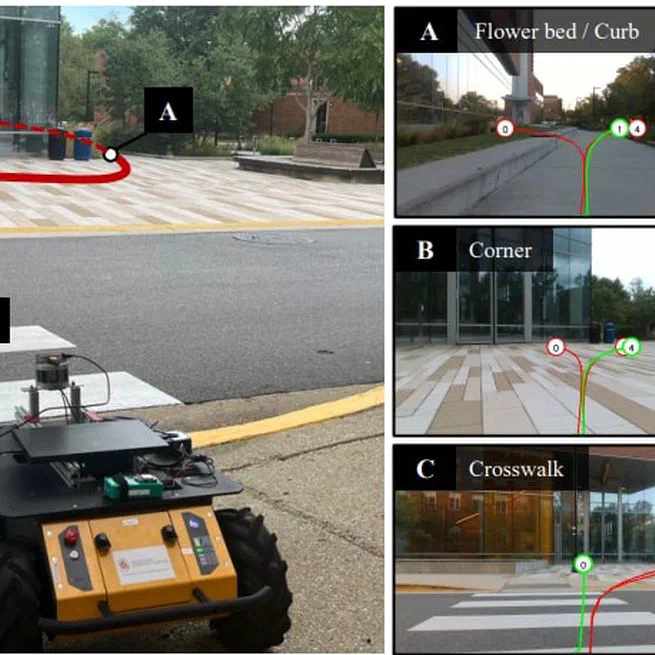
VL-TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Oct 44, 8080
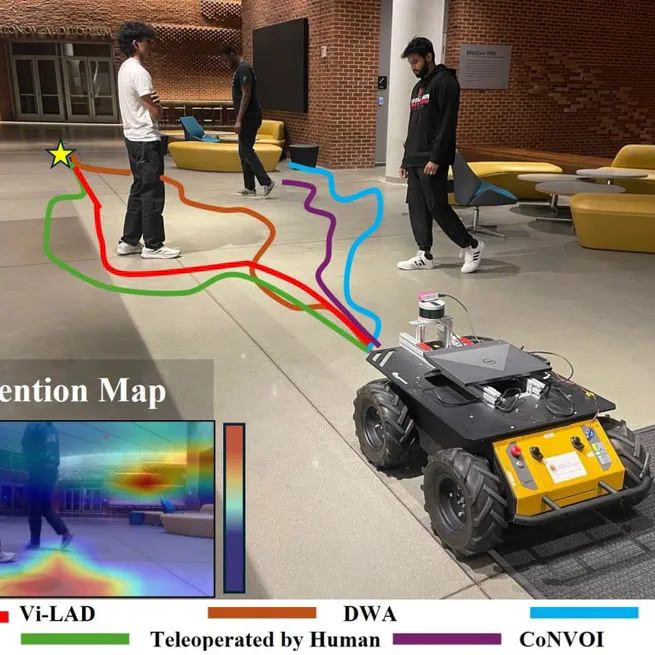
Vi-LAD: Vision-Language Attention Distillation for Socially-Aware Robot Navigation in Dynamic Environments
Oct 33, 27270

VLM-Social-Nav: Socially Aware Robot Navigation through Scoring using Vision-Language Models
Oct 11, 27270
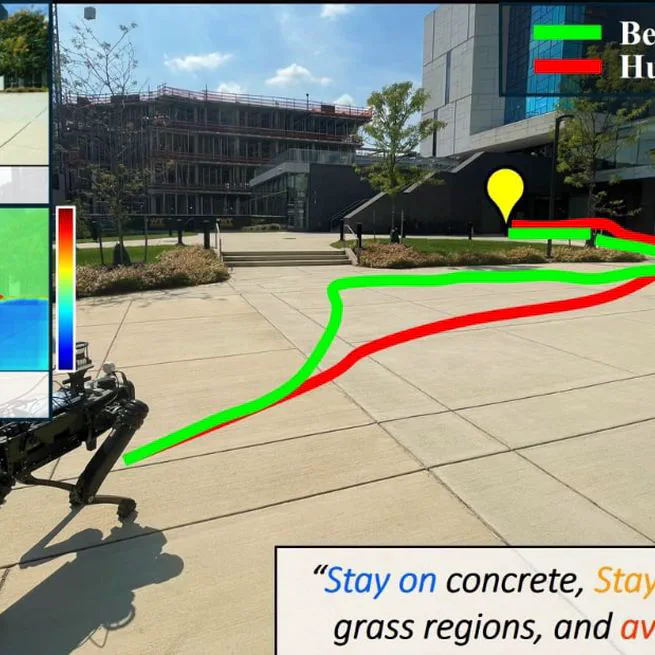
BehAV: Behavioral Rule Guided Autonomy Using VLMs for Robot Navigation in Outdoor Scenes
Oct 11, 26260