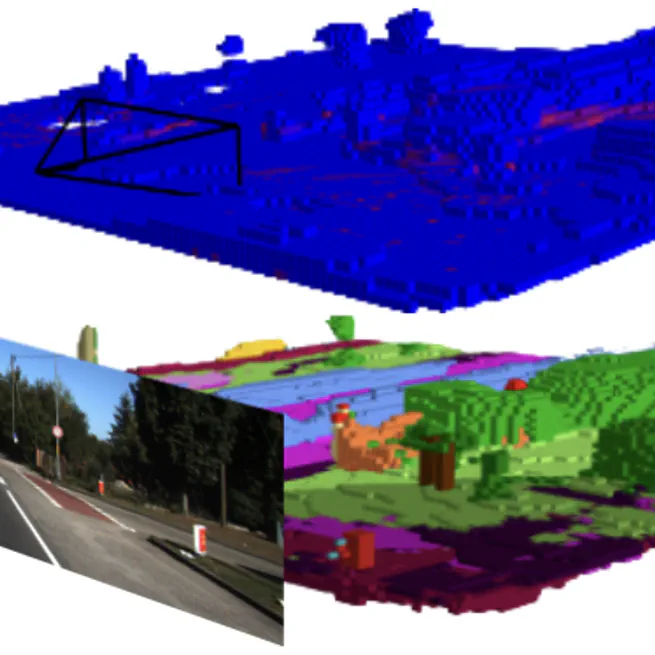
ET-Former: Efficient Triplane Deformable Attention for 3D Semantic Scene Completion From Monocular Camera
Oct 66, 10100
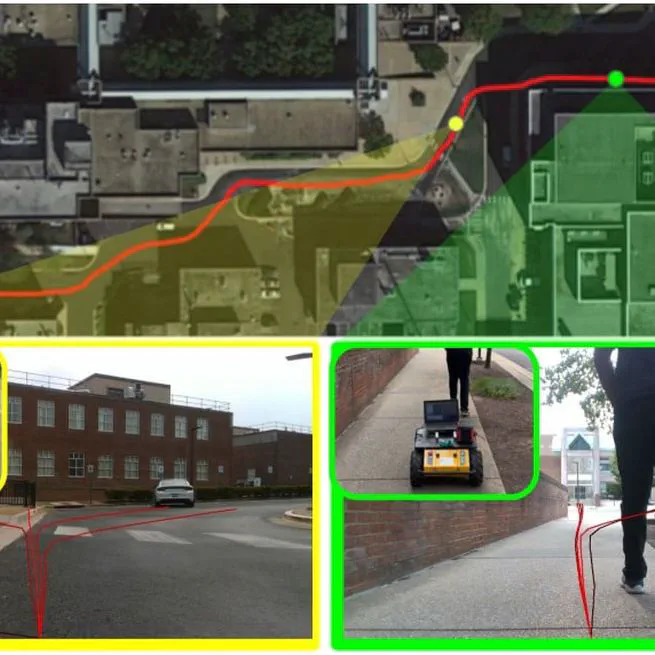
Mtg: Mapless trajectory generator with traversability coverage for outdoor navigation
Oct 55, 13130
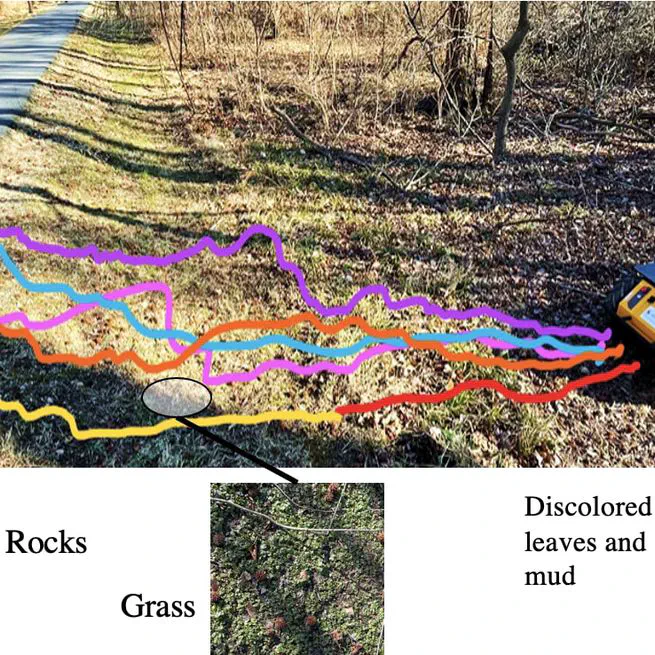
Terrapn: Unstructured terrain navigation using online self-supervised learning
Oct 1010, 23230

Autonomous social distancing in urban environments using a quadruped robot
Oct 11, 6060