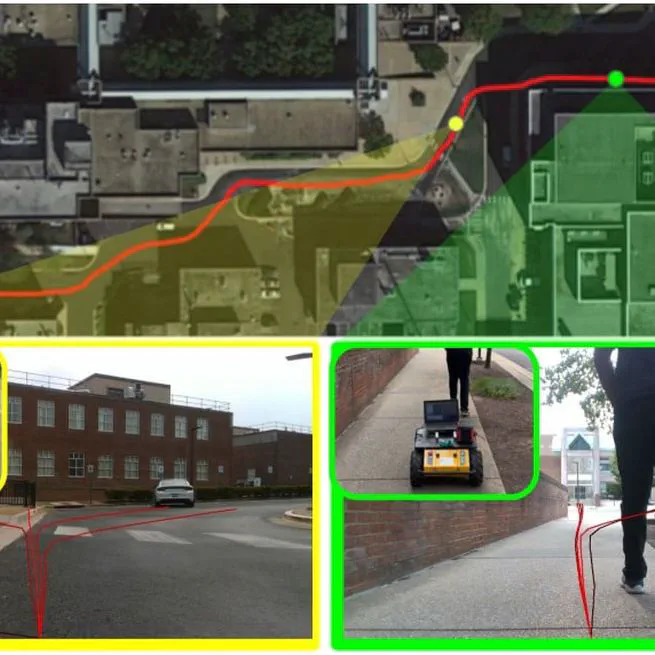
MOSU: Autonomous Long-range Robot Navigation with Multi-modal Scene Understanding
Oct 55, 8080
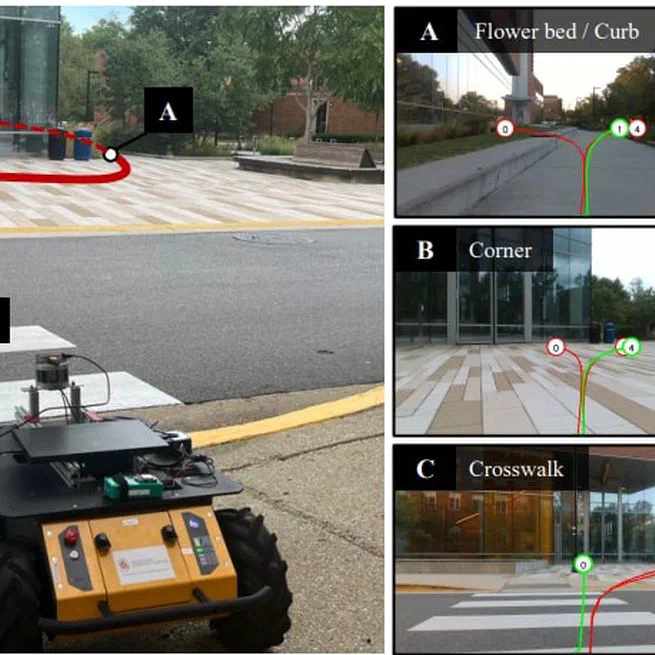
VL-TGS: Trajectory Generation and Selection using Vision Language Models in Mapless Outdoor Environments
Oct 44, 8080
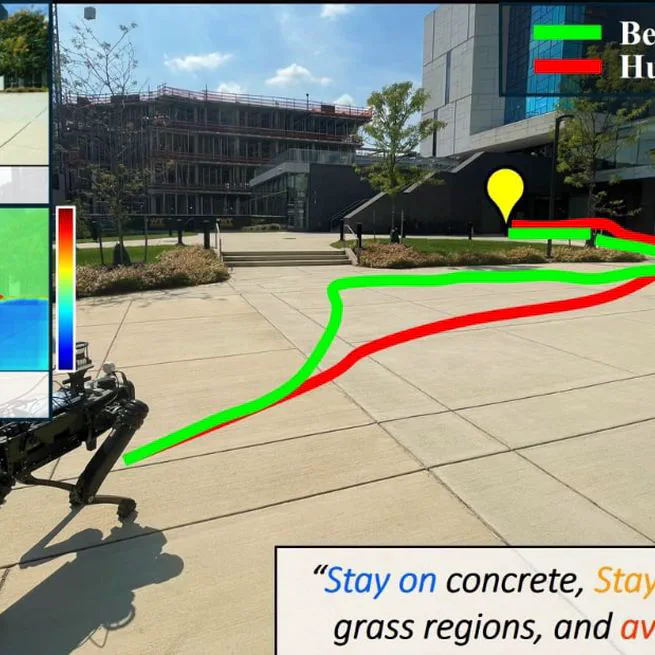
BehAV: Behavioral Rule Guided Autonomy Using VLMs for Robot Navigation in Outdoor Scenes
Oct 11, 26260
Mtg: Mapless trajectory generator with traversability coverage for outdoor navigation
Oct 55, 13130